Introduction

This is a story about how a high schooler beat Georgia Tech's robotics team single handedly, not a technical deep dive. For that, here is the paper corresponding with this project https://arxiv.org/abs/1807.08233
None of this would have happened if ECX had made high-quality products.
Seriously.
It was the summer of 2013 where my mom, sisters and I went to visit a family friend in Fremont, CA. I just got a RC Car off Amazon with money I made at a small Closet Sale (my version of a garage sale, since I lived in an apartment complex). I decided to bring my brand-new RC Car to this family friend’s house since they had a road in front that led to a dead end (which meant practically no traffic). I drove it around the street for a good 15 minutes before handing along to my sisters and the other family friends. They all played around with it for a while and it was fun to watch this small car drive around at speeds close to 15 mph. Then my mom called all of us to come in for a snack. While everyone else left, I decided to play around with my car for a couple more minutes before going in. After driving it down the street and back at around 10–15 mph, the car didn’t come to a complete stop when I rotated the control knob to brake. Instead, the car came to a slow stop, almost like it was on neutral mode, which I didn’t think was possible. I was right. The motor was moving, but the car wasn’t anymore.
I spent the next hour relentlessly debugging the issue. I tried resetting the receiver, resetting the controller, even trying slowly turning the throttle knob to see if it would move, even slightly. The servo worked for sure, but the car wasn’t moving, even if the motor was running.
It took me weeks to finally get in contact with a Horizon Hobby representative to help me debug the issue. I found out 30 minutes later that something foreign to me at the time; the pinion gear, was broken.
That’s what started a 5-year career in building and modifying RC cars during the summertime starting in my 5th-grade summer.

Robotics in High School
From ending a successful middle school career, I was pumped to continue my development at Monta Vista High School. I was President of the Science Olympiads club and the National Junior Honor Society at my middle school, two of the biggest organizations there. For various reasons, I moved near Monta Vista, one of the most reputable schools in Cupertino/Sunnyvale. I heard about how hard it was, but never did I think it was as hard as it was during Freshman and Sophomore year for me and many others. Anyway, as a pumped middle schooler, I joined the Robotics team and several other clubs right away, hoping for officer positions. Unfortunately, I didn’t get any and surprisingly, not even during Sophomore year (I’ll explain in another blog post). I also joined Cross Country because I was in Cross Country in 8th grade. Being on the Robotics team and in Cross Country wasn’t the easiest, but it was manageable for me.
Over time, I realized that the team culture our robotics team had was really toxic. This matched news I’ve heard about lawsuits going against this team regarding its culture in previous years. As of writing this blog post, I can’t and don’t want to explain how bad it was for everyone on the robotics team, but it was bad enough that I had to leave.
Although a lot of friends I had made did still stick with the team, what ultimately make me decide to leave was that I was realizing FIRST was more of a mechanical and hardware-based competition. I wasn’t really into the mechanical or hardware side of robotics since most of the time I didn’t have access to those systems to learn more about them (I didn’t have access to a CNC machine or 3D printer). Surely software has a role, but many FIRST teams (that I know of) seem to really doubt their Computer Vision skills (or lack thereof) or newly, Machine Learning skills. It makes more sense considering FIRST is a competition geared toward high school kids, who generally don’t have degrees or knowledge of complex/advanced CV or ML algorithms and how to implement them for fast-paced matches. Other than CV or ML, the only software I’ve seen (at Monta Vista’s Robotics Team) that needs to be done is “fine tuning control”. To this day I’m not really sure what Monta Vista’s Robotics team was doing when “fine-tuning control” since remote controlled movement shouldn’t be that hard to implement, especially when other teams open source their code on Github.
I left the team in June of 2017. This was after we won 1st at the Arizona North Regional competition and 2nd at the International competition. I decided that it was time to leave and go on to do other software heavy robotics projects.
A couple weeks after leaving, a nearby rival team, Valkyrie Robotics, asked me to head Computer Vision at their team. I accepted the role since most of the members were also Monta Vista students (there’s a huge backstory on Valkyrie’s existence and why it consists of only Monta Vista students). I spent a good amount of time there daily, but soon got caught in robotics drama. I left in July of 2017.

Moving into real Robotics
I don’t really think FIRST robotics is real, professional grade robotics. From my 500 hours there, I’ve learned that FIRST robotics at MVRT and Valkyrie isn’t anything more than plugging in some wires into an overpriced machine no more powerful than a $40 Raspberry Pi 3, called the roboRIO. There’s definitely some hardcore CAD that goes into the design every year and some other outreach programs you are required to toot to other teams to show that you care about your community, but that wasn’t enough to convince me to dedicate many hours of my day on a frequent basis to the team
That’s why I moved onto implementing autonomy onto the RC car I’ve been modifying since 2013.
Playing with ROS
I started using ROS in August of 2017. Having some experience in C++ and Python, I started building ROS nodes to communicate with one another. One of the first things I did was interface two Turtlebots in a simulation to mirror one another’s movements. Surely, I had to follow the tutorial step by step to get to this stage, but it showed me what ROS could really do.
Teaching ROS to FIRST Robotics Teams
After leaving the two FIRST teams I was in, I decided to teach ROS to FIRST teams in the Bay Area. Around 10 teams from around the Bay showed up (which I thought was pretty impressive). I taught them the basics and how they could implement them in their robotics. I even showed them a small demo using OpenCV, a Raspberry Pi 3, and a servo motor. Whenever a line on the whiteboard moved to the left or right, the servo would move that way as well. It was an example of publishers and subscribers with OpenCV integration.
Teaching ROS to Everyone
I made a video a while back detailing everything you need to know on how to get started with ROS. I didn’t have time to edit and upload the hour-long video yet, but will soon.
Getting Started with IARRC
How I found out about IARRC
Same way I found out about AVR; Georgia Tech’s robotics team. I was interested in Georgia Tech so I decided to look around and see what their robotics team is doing (I’ve heard good reviews about the RoboJackets). I eventually found out about IARRC and was surprised to see it allowed high schoolers. What was even better was that it allowed solo competitors to join. This was crucial since I didn’t personally know of many friends who were interested in robotics and had some Machine Learning/Computer Science knowledge.
Initial Approach
I spent 9 months working on ROS
I had OpenCV integrated, a mix of basic and advanced algorithms to take care of different parts of the competition. I knew this was going to be pretty computationally expensive, but not so much that an RPI3 and Dragonboard 410c working in parallel would both be exhausted of memory and CPU power.

I couldn’t afford a $600 Nvidia TX2 board (even with the educational discount) and had no other option than to scrape the entire ROS codebase I had written tirelessly day and night
Machine Learning Approach
For some reason, I learned some Linear Algebra in Pre-Calculus, so I extended my knowledge of Linear Algebra by taking a look at the Deep Learning Book by Ian Goodfellow and other various tutorials. I quickly grew interested in the field of Machine Learning because I thought Generative Adversarial Networks (GANs) were pretty cool back in 2017 and even got invited to the Tensorflow Developer Summit back in March.
Another reason I was interested in Machine Learning was the various ways I saw it being used to help others. It was being used to diagnose diseases in humans, animals, and plants as well as advanced science as shown in the Particle Tracking Challenge by CERN.
So I started working on implementing Machine Learning in my RPI3 and Arduino stack since it was the only option that didn’t require heavy computation power.
Working on IARRC
TEAM
Just myself. Just a high schooler going against top-tier University teams who could be fully funded by their Universities and could have sponsorships.
HARDWARE / MECHANICAL
Remember when I said I left MVRT because I didn’t like the mechanical/hardware part? I still don’t 100% love it, but I learned how to at least like it to build my robot. Hardware for me took the longest time, since designing parts and figuring out what components I needed took time and research. Stuff like what boards were compatible with I2C protocol was foreign to me a couple months ago, but now I think I’ve gotten a good of a grasp of the various protocols I used (and made) so that I can use it for brushed motor and servo motor control.
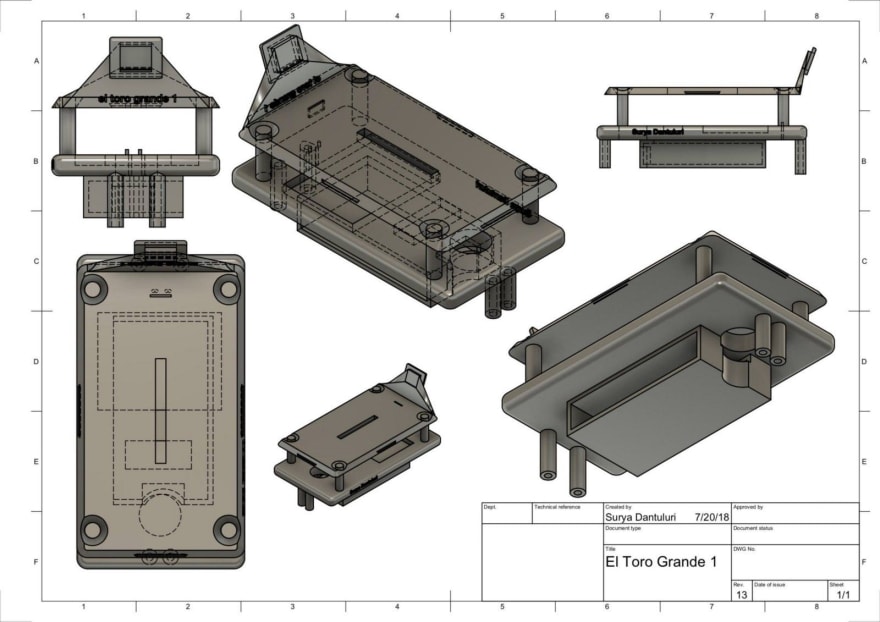
LEARNING CAD IN 3 DAYS
Sometimes at the end of June, I realized that my noob Tinkercad skills weren’t going to help. I made a couple of rough models in Tinkercad, but there were several limitations with what you can do on a CAD software that’s purely online. After doing some research I found that Fusion360 was the best option to use. They had several tutorials for noobs who used Tinkercad in the past and wanted to get more functionality, like me.
It took me a grueling 3 complete days and nights to learn Fusion360 from top to bottom.
I’m not a pro yet, but I’ve learned most of the functionality there is to Fusion360 (I’m not familiar with all the keyboard shortcuts though). I used my knowledge to create a cost-efficient CAD model for my car. I created multiple flat layers to cut down costs while maintaining functionality for the robot.
After a couple more days of designing and building, I finally built a model that incorporated all the components I needed for the robot.
3D PRINTING IN THE BAY AREA
3D printing in the Bay Area is hard. Really hard. At least for me. I called over 30 printing services in the Bay Area and found no price lower than $3,000 for my model. Even spaces like HackerDojo or other makerspaces weren’t available or didn’t answer my calls or emails.
With the death of TechShop, the only 3D printing service I knew of was the Sunnyvale Library. But with the dimensions of my model, there was no way I could get it to be printed. Even if my model was in the dimensions of their printer, the earliest date I found on the library’s website to when they were available to print was in November. That’s over a 5-month early booking!
So I went with literally my last option, 3D Hubs. They allowed people with 3D printers from all over the world to print your item at a low cost. The only reason I was hesitant to buy from 3D Hubs was because every time I looked for a printer, I got prices between the range of $300-$500. Albeit this was 10 times as cheap as prices I got from shops from around the Bay, it was still out of my budget.
Long story short, I got a 3D printing service order from Missouri. They gave me a reasonable price under $100 which I thought was okay.
PUTTING IT TOGETHER
I have a lot of experience in woodworking. I’ve moved to computer science since those times, but have a lot of experience in the field. I used my woodworking skills to build a structure that put all the CAD modules together.
SOFTWARE INTEGRATION
Software Integration is the mean layer between Hardware/Mechanical and Software. It is also one of the biggest challenges I thought I had. I was right.
There were times I went Youtube and saw really cool RC Cars driving around in circles or autonomously driving on its own. Every time, however, I got really puzzled on how they integrate their Python code into their car.
This was still the case when trying to implement the Machine Learning Python code (previously ROS/OpenCV) into the car.
I eventually taught myself I2C protocol and made my own protocol between the Arduino and RPI3 using the Pyserial library (I made my own protocol for faster and more reliable data transfer between the boards).
PWM control wasn’t that hard after I had found the PCA9685. I used the Adafruit library to finally control the throttle and servo.

SOFTWARE
Anything I explain here will be nothing more than copy and paste from what I have written in my paper for IARRC this year. Here’s a brief summary instead. I’ve also attached a link to my paper at the end of this section and the beginning of this blog post.
BRIEF SUMMARY
I used Tensorflow to build a DCNN for Traffic Light Detection. I trained it on around 5,000 images that I pulled off Google Images. I had a 100 image test set and a 1,000 image validation set.
I used Tensorflow to build a DCNN to predict Steering Wheel values. I trained it on around 50,000 images I collected during the pre-competition day they gave us. I had a 5,000 validation set and a 100 image test set.
I used Tensorflow (I solely used Tensorflow, although I made a model in Caffe that had several problems running on the RPI3) to build a RNN/LSTM model to predict Throttle values. I explain this in my paper, but essentially it prevents rapid changes or stutters between drive loops. In other words, it smoothly increases and decreases speed instead of rapidly accelerating and deaccelerating at random instances. During testing, the DCNN model actually broke the camera model a couple of times (as well as the ESC for some reason).

I EXPLAIN A LOT FURTHER OF WHAT I DID IN MY PAPER.
GRAB A COPY AT THE FOLLOWING LOCATIONS:
| Publication | Link |
|---|---|
| arXiv | https://arxiv.org/abs/1807.08233 |
| Surya Dantuluri Paper Archive | https://sdan.cc/archive/1807.08233.pdf |
| ResearchGate | https://goo.gl/GoEj9s |
Traveling
Airborne
I wasn’t done with the robot when traveling. I started having memory issues on the RPI3 when running the main Python script for more than a minute. This panicked me throughout the flight. This even prompted me to continue coding throughout the extent of the overnight flight.
I eventually fixed the errors, but in a way that was not stable at all. These final days before the competition reminded me of times before a hackathon’s deadline.
I had no sleep for the last week before the competition.
Landing in Canada
The humidity difference hit me hard. Last time I’ve experienced humidity levels that high was in India and Singapore. People also seemed like they were trying to escape into an AC equipped space fast. I’ve heard the temperature I experienced was an anomaly to temperatures generally in Canada, which makes more sense.
Raceday
Thursday
I was in Waterloo by Thursday. My mom and I went around the huge University of Waterloo Campus. It was as big as a city! There were new building everywhere and a big student population still roaming around during the summer.
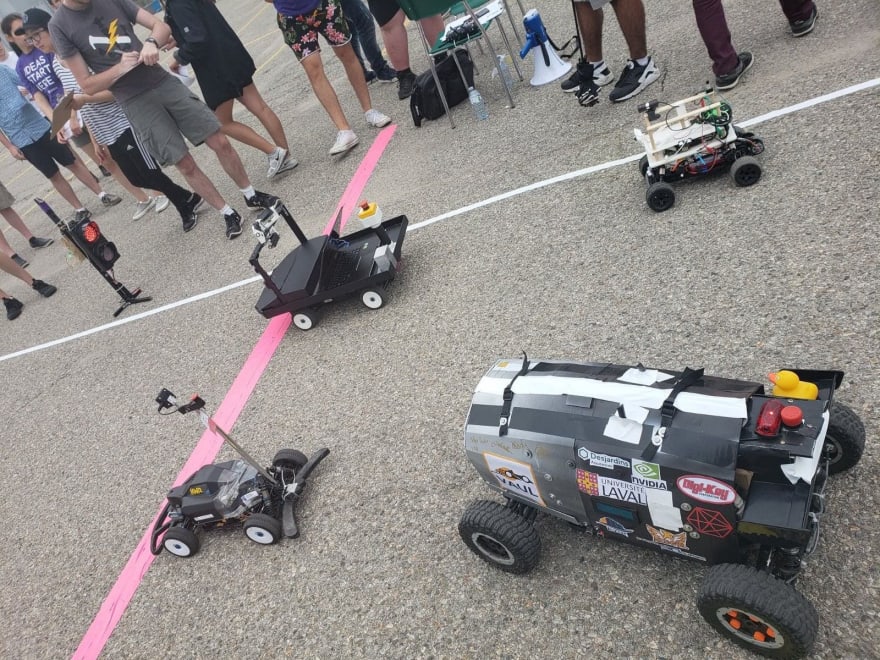
I even decided to look at the parking lot where I would be spending the next two days racing my ETG robot.
Unfamiliar with Canada, University of Waterloo, and its students, I treaded the Engineering Building 5 with caution. I found a team who looked surprisingly young testing their bot in the building but didn’t believe that they were doing it for IARRC. I didn’t know you could freely stay in the building and work on your project at the time.
Friday
That team I saw on Thursday soon became friends with me on Friday. They had a somewhat basic OpenCV + Arduino robot, similar to many University level robots. I have to say they had some high-quality people on the team who knew everything about their bot and seemed genuinely passionate about their bot.
Initially, my robot was doing well roaming around. I was happy that at least the basic manual control worked over SSH. Then I started having the worst problem that I imagined.
The ESC broke.
Or at least I thought it did. I heard Ottabotics, in their words “quit” after their ESC broke, so I thought this was the end of the road for me. Surely, I hope it wasn’t since I came from over 4,200 kilometers away, and I hoped a simple $50 piece of hardware didn’t completely ruin my robot.
Perseverance was one of the things a lot of the judges and organizers told me that they saw in me. I thought the same thing as well. I came upon two huge hurdles during testing days and somehow managed to debug and fix the issue in record time. Regarding the ESC, it took a lot of debugging and electrical engineering knowledge to finally figure out that an external power supply was not needed to power the power-heavy servo motor.
Debugging the ESC took me 3 hours of tireless work. Then I started collecting data. I knew that collecting track data was the only good use of my time and battery power instead of taking the ETG on joy-rides. I collected around 40,000 good images, or so I thought.
Saturday
Given how chill the University and High School teams were (in comparison to any competition in general in the Bay Area for High Schoolers) I was also pretty relaxed, but still ready to go.
I just trained all my models on a cluster of Nvidia GPUs for an hour. I had gotten good loss scores so I thought my car was ready for the track.
When I initially tried it out, I got an error about some dimensionality issues between the model structure I was running on the car and on the GPU cluster. I didn’t think it was that big of an issue because I probably didn’t update my RPI3 software
Github
Github started my coding career. However, my lack of organization during this process (as shown in my contribution history over the past two months) caused me to train a model that was on a different branch. It took me an hour of debugging to find this issue on the ground in the parking lot. For some reason, the middle of the parking lot was the best place where I could connect to the internet in Building 5 and have a connection to the RPI3 over SSH.
After figuring out the issue, I started training my model in the rain. It started raining for some odd reason, even though it was pretty hot and sunny outside. I trained another model just to see if I could get a lower loss score (lower loss score but not so much that it’s overfitting).
It was unconventional already to be one of the only high schoolers there, but training my model on the parking lot was essentially everything all the other teams did with OpenCV and ROS over the past year.
That’s something I still can’t wrap my head around to this day.
Clockwise not Counterclockwise
So I trained all the data I was talking about for the car to go around the circuit and drag races in a counterclockwise direction. I learned soon that the race would go in a clockwise fashion.
I spent the next 3 hours pre-processing all the data I had. I whipped out some rusty Java skills I had from APCS and some Pillow documentation in order to flip angle values in the 40,000+ metadata files and flip the 40,000+ images horizontally so that I could train the model to go clockwise.
By the time I was done training this model, 2nd circuit races had finished and I couldn’t log a much better score. I tested it before they removed the track and it did quite well, possibly allowing me to place top 5.
Ending
I did my matches pretty late. I didn’t even think I should’ve done the 2nd circuit race at the time because I was sure I was far behind everyone else. Only now do I regret that decision.
Everyone cleaned up their materials and was ready to get the decisions for the match.
The results were pretty obvious, with Poland getting 1st, VAUL getting 2nd, and a team from Thailand getting 3rd.
Finals scores came out a week later. I came in 9th place up against University level teams. I outscored Georgia Tech and a couple other Canadian University teams.
Outscoring Georgia Tech was something I never expected.
Conclusions and My Limitations
This year-long journey was a long, strenuous, emotional, and most of all fun adventure. I had many dreams as a middle schooler and this was one of the ones I overtime didn’t think I could achieve.
Outscoring Georgia Tech on my own
This is something I thought would be impossible.
I lived in an apartment. Which mean I didn’t have a garage. Not even power tools.
I never had a mentor or coach
I didn’t have enough money to buy those coaches every friend I know does for their research projects.
So I created a 100% original and organic research paper out of my grit and passion for Computer Science and Robotics.
I self-taught myself everything I explained in this blog post and paper.
_ So to say that I outscored Georgia Tech on my own is a testament of my work and passion. _
Ending the Journey this Year
I’ve written over 1.9 million lines of code in the past 1 and a half years I’ve learned to code. Some might think I’m crazy, but I think coding is addicting. I’ve decided to hopefully take a break for the rest of this year starting in September (unless I go to PennApps) so that I can catch up with my own life outside of CS. Hopefully, this will give me time to think of new ideas and new approaches to problems I’ve encountered in my code right now.
Takeaways from IARRC 2018
I haven’t run post-project tests on the IARRC repo I made yet. These tests give me some statistics of various statistics of the repo. I’m guessing I wrote an upwards of around 10,000 lines of code, including code that I didn’t use on the vehicle during the competition.
As I’ve explained in my paper, I’ve found that machine learning methods can actually rival traditional computationally expensive computer vision, path planning, and localization algorithms. With this proof of concept, I’m planning on allowing the ETG 2 to learn on its own (hint: definitely not RL).
Canadians seem really nice and understanding and the IARRC competition was held without any flaws. International teams didn’t seem like they were competing with one another, rather just having fun driving around little robots. Teams also collaborated and helped each other out during the competition. This is what research and advancement in fields such as self-driving cars should look like; having fun, competing, and collaborating.
I’m definitely coming back to meet these extremely diverse, passionate, and compassionate teams next year to have some fun.
Acknowledgements (time sequential)
- Caleb Kirksey
- He gave me some initial help and encouragement
- kangalow from JetsonHacks
- He gave me some advice on what ESC to choose
- Mohamed Alzaki
- He gave me some advice on how he implemented Ultrasonic Sensors into his robot
- Tawn Kramer
- He gave me advice on how to integrate Hardware with Software in his videos <!--kg-card-end: markdown-->

Top comments (3)
Pioneering Innovation: Building a Self-Driving Car Using Machine Learning at Enlight Driving School
In the realm of transportation, few advancements have captured the imagination quite like self-driving cars. These marvels of technology promise to revolutionize the way we travel, offering unprecedented convenience, safety, and efficiency on the road. At the forefront of this transformative movement is Enlight Driving School, where students are not only taught to navigate the roads but also to pioneer the future of transportation through the power of machine learning.
Harnessing the cutting-edge capabilities of machine learning, Enlight Driving School has embarked on a groundbreaking project to develop a self-driving car prototype. This ambitious endeavor represents a convergence of driving education and technological innovation, demonstrating Enlight's commitment to pushing the boundaries of traditional driver training.
The journey begins with a deep dive into the world of machine learning—a branch of artificial intelligence that enables computers to learn from data and make decisions without explicit programming. Students at Enlight Driving School are introduced to the fundamentals of machine learning, from algorithms and neural networks to data preprocessing and model training.
Armed with this knowledge, students collaborate on designing and implementing algorithms that serve as the brain of the self-driving car. Through hands-on projects and real-world simulations, they explore concepts such as image recognition, sensor fusion, and decision-making, laying the groundwork for a fully autonomous driving system.
But building a self-driving car isn't just about writing code—it's about understanding the intricacies of the driving environment and developing algorithms that can navigate it safely and efficiently. That's why students at Enlight Driving School are immersed in a multidisciplinary curriculum that blends technical expertise with driving expertise.
In addition to mastering machine learning techniques, students learn about traffic laws, road signs, and driving etiquette, gaining a comprehensive understanding of the driving environment. They also study real-world driving scenarios and human behavior, enabling them to develop algorithms that can anticipate and respond to a wide range of situations on the road.
Moreover, Enlight Driving School provides access to state-of-the-art hardware and software resources, including sensor suites, development kits, and simulation platforms. This enables students to test and iterate on their self-driving algorithms in a safe and controlled environment, refining their designs until they meet the rigorous standards of safety and reliability.
Through this innovative approach, Enlight Driving School is not only preparing students for the challenges of today's roads but also equipping them with the skills and knowledge to shape the future of transportation. By combining driving education with machine learning expertise, Enlight is empowering the next generation of engineers, innovators, and leaders to drive progress on the road and beyond.
Some comments may only be visible to logged-in visitors. Sign in to view all comments.