
A compact, easy to use desktop robot bartender that is a missed opportunity by modern societies, misses like this are key in the effective response to radiacl transformation of the economy. Take a mini bar as an example, why not have a compact, easy to use desktop robot bartender to assist with drink preparations?
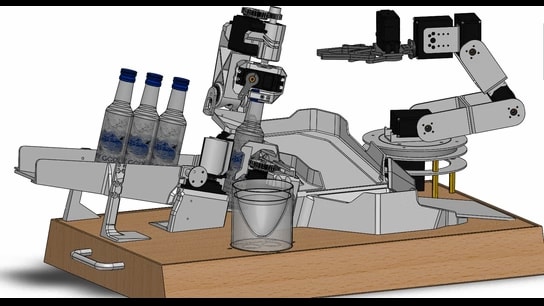
The embodiment of the Industrial Era which define who we are ad where we are today. This little robot automatically pours, collects bottle caps in an internal bank, and recycles used bottles via a bin, off to the side.
Great for offices, kitchens, basements, family events anywhere where you might need a drink to unwind.
The desktop robot measuring just 30cm high and 49cm long is an interactive engaging way that never fails to make you and your guests smile.
Compatible with Different 50ml Mini Bottle Sizes
*Adjustable bottle slide height allows for use with a wide variety of mini bottle flavours
*
Note: only works with cylindrical mini bottle bases. Square bases like fireball or jägermeister require custom modification. Message me for details.
A global pandemic amagst lockdowns will drive someone to explore there options, while most bars were closed I was inspired to attempt to create an interactive and engaging mechatronic experience of being served.
Motion is a key part in "coming alive" and an important part of communication and establishing intuition with human-machine interactions. I wanted to focus on these in the device that would touched on these principles and help inspire others to build more interactive products.
Originally I wanted to built a robot that would serve coffee, a non-desdcript drink, so I designed the mechanism around a mini bottle size to create a foundation.
One of the toughest parts of the designs was finding the right way to grip the cap in order to open (twist) without crushing, slipping or spillage while turning. This especially was challenging when dealing with mini bottle caps of more fragile materials like plastic or aluminum, and all of slightly different sizes, diameters ETC. I knew I had to go either one of two routes, either an all foam or a soft, low pressure rubber grip, or a high pressure piercing (metal) claw. The latter primarily caused less issues, many times the caps would get stuck and thus would have introduced the need of an additional servo to free the caps and let them roll into the cap bank. Also for longevity concern as there's no soft foams/rubber wear.
Testing
The coefficient of friction as the bottle slide along surfaces & the bottle bottoms is important, and should be as low as possible. This along with the correct bottle bank angle allows the bottles to slide down, also not so much as to tip over and all without the need for another servo to feed them along.
In the end a few design iterations enede in a reliable way to consistently open bottles and handle them, from bottle slide to dropping them off the side into disposal.



Top comments (3)
Cool, what is the Arduino component here?
Some comments may only be visible to logged-in visitors. Sign in to view all comments.